
Miután eldőlt, hogy a D-5 komplexumot kapja meg, részleteiben is megtervezhették a Projekt 667A-t. Az alkalmazott megoldásokat mutatja be az első fejezetében a sorozat 3. része, kiemelve a meghajtás és a zajszint kérdéskörét. A második fejezet már a pontos, víz alatti navigációs rendszer létrejöttét részletezi, és számos, a tengeralattjárón található, további eszközt, berendezést ismertet. A sorozat első része ITT olvasható, míg az előző ITT.
A Projekt 667A osztályú tengeralattjáró
A korai szovjet SSB(N)-ek után a Projekt 941-esig a világ összes rakétahordozó tengeralattjáróján egyeduralkodónak bizonyuló alapkialakítású lett a Projekt 667A is, azaz az orrban lévő szonár és torpedók után nem sokkal következett a torony és alatta az irányítóterem, majd rögtön a rakétaindítók szekciója, a törzs vonalából enyhén kiemelkedően. Ezt a reaktorok, a gépészet, majd a törzsvég követte. A szovjet tengeralattjárókra jellemző módon a burkolat kettős volt, a 9,4 m átmérőjű, nyomásálló belső AK-29 acélból készült, kívül lévő bordákkal, a keresztirányú fő válaszfalakkal egyezően 40 mm-es vastagságban. A nyomásállósági kritérium 10 kg/cm2 volt. Az egyes keretek 12 mm vastagok voltak. A külső borítást JuZ (ЮЗ) acélból gyártották, legfeljebb 11,7 méter átmérővel. Amíg a törzs végén a merülési kormányok és a függőleges kormánysíkok a hidegháborúban klasszikusnak számító, kereszt alakban voltak elrendezve, addig az orrban lévő merülési kormányok a korábbi szovjet osztályoktól eltérően a toronyra kerültek. Ezt bevallottan az amerikaiaktól lesték el az oroszok, mert megkönnyítette az állandó mélység tartását a rakétaindítások között, és kis sebességnél nem kellett trimmelni a hajót nagyobb merülési mélységekig sem.

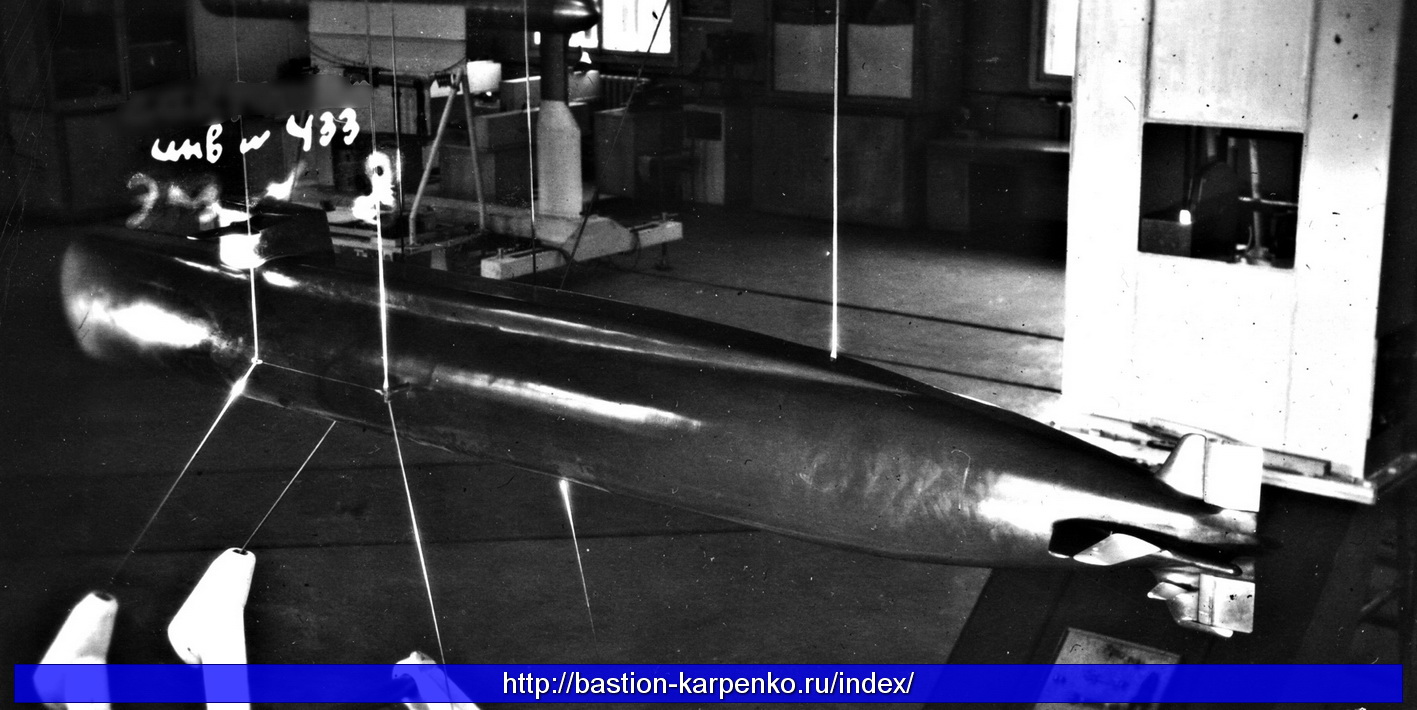

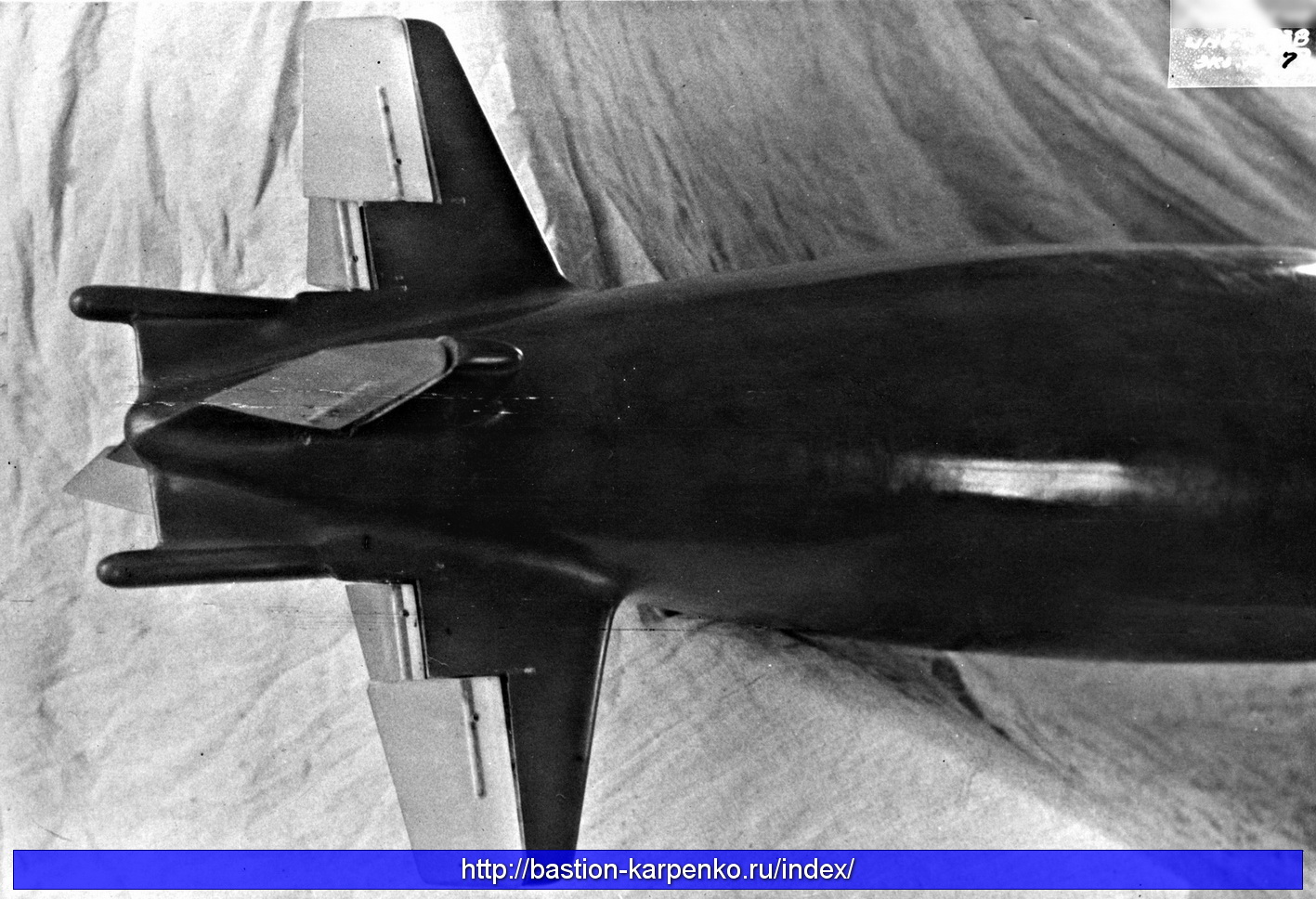
A Projekt 667A egy modelljéről készült, három fénykép fent, és a modell hátsó részére közelített fotó lent
A Projekt 667A tartalék úszóképessége jelentős, 29%. Ez a kettős burkolatból is következett, de egyébként is elvárás volt, hogy a szovjet tengeralattjárók egy elárasztott rekesszel ne süllyedjenek el, azaz ezt a jelentős plusz súlyt a többi rekesz felhajtóerejének kompenzálnia kellett tudni. Ebből meg az következett, hogy minden egyes keresztválaszfal ugyanolyan nyomásállóságú volt, mint a teljes törzs. Ez jócskán megnövelte a szerkezeti tömeget az amerikai tengeralattjárókhoz képest, amelyeknél nem volt ilyen elvárás, és amúgy is kevesebb, akár fele annyi rekeszből álltak csak. Normál működés esetén viszont más célja volt a nagy tartalék úszóképességnek. A szovjetek nagyon koncentráltak a sarkvidéki műveletekre, nem utolsó sorban az onnan történő SLBM-indításokra gondolva. Bár tudták, hogy csak a sokadik rakétájuk lesz elég nagy hatótávú az ebből a térségből való indításhoz, azt is tudták, hogy eljön ez az időszak. Az itteni indításhoz viszont át kellett törni a jégtakarót a tengeralattjáróval, mert erre a rakétákat nem lehetett felkészíteni. Az amerikai SSN-ektől is gyakran látni, hogy így jönnek a felszínre, míg a szovjeteknél az SSBN-ek tették meg ezt gyakran. A nagyobb úszóképesség esetükben azt jelentette, hogy sokkal vastagabb jeget is át tudtak törni (nagyobb felhajtóerejük nagyobb nyomást fejt ki a jégre), azaz, potenciálisan több helyről végezhették el az indítást, nem csak a relatíve vékonyabb jégrétegek alól. A sarkvidéki műveletekről később részletesen lesz szó. Végezetül, a kettős burkolat a hagyományos támadások, mint például mélyvízi bombák ellen is nagyobb védelmet jelentett, ennyiben is a ’40-es évek örökségének tekinthető.
A belső rekeszfalak nyomásállósága legalábbis a későbbi osztályokon már nem volt egységes, a törzsével azonos értéket inkább azokra a rekeszekre koncentrálták, ahol a személyzet általában – vagy nagyobb létszámban – tartózkodott.
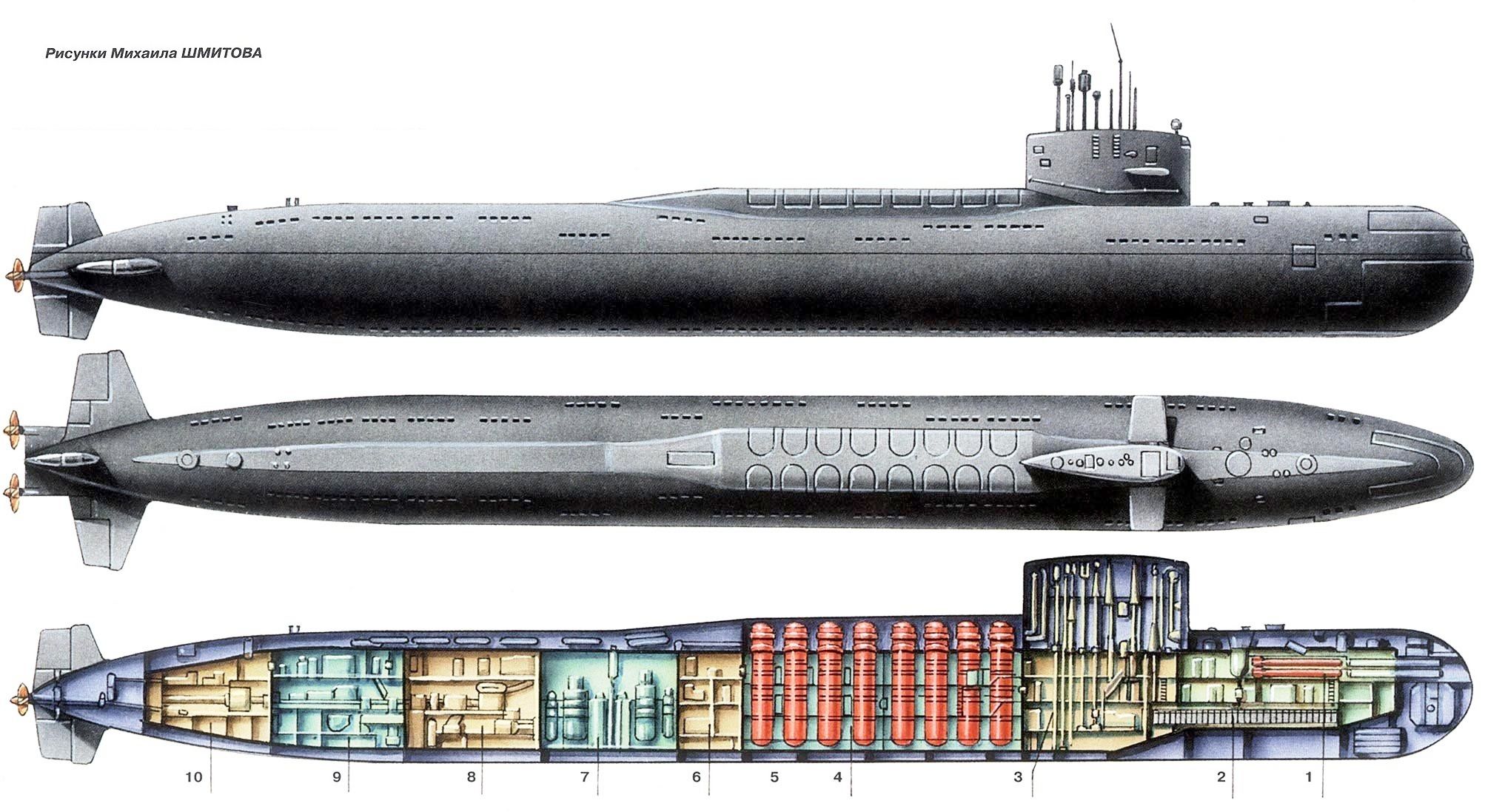
A Projekt 667A rekeszei, illetve néhány fontosabb berendezése egyszerűsített és színezett metszeti ábrán. 1: torpedóterem; 2: akkumulátorok és a személyzet szállásai; 3: irányítóterem és reaktorvezérlő (központi rekesz); 4 és 5: rakétaindítók rekeszei (a jelölés kissé zavaró, de a rajzon jól láthatóak); 6: segédgépek; 7 reaktorok; 8 és 9: turbinatermek; 10: villanymotorok

Egy kissé szokatlan perspektíva: a tornyon lévő merülési kormányok egyike alól készült fotó
A meghajtásért a NIKIET tervezte OK-700 rendszer felelt, mely két VM-4-2 nyomottvizes reaktort foglalt magába. (A logikusan OK-350-esnek nevezett kialakításban a nagyon hasonló VM-4-1 reaktorból egy hajtotta a Projekt 670 (Charlie) SSGN-eket.) A VM-4 a második generációs szovjet atomtengeralattjárók standard reaktorának bizonyult, 140-nél is többet készítettek belőle. A korábbi típusokhoz képest például a cső a csőben építési elv és az eleve rövidebb vezetékhosszak miatt kisebb méretek, blokkszerű elrendezés, valamint moduláris primer kör jellemezte. Ugyanakkor a korábbi kettő helyett öt főkerkingtető szivattyú tartozott egyetlen primer körhöz. Ez bonyolultság, méretek és zaj szempontjából kedvezőtlen volt ugyan, viszont egyenletesebb hő- és áramlási terhelést jelentett, pláne, ha az egyik szivattyú kiesett valamiért. Általában is jelentős redundanciát biztosított a két és félszer több szivattyú. A VM-4 család reaktorfizikai tekintetben is sokkal jobb volt az elődjeinél, vezérelhetősége sokkal egyszerűbb volt, és nem alakult ki az úgynevezett jódgödör jelenség, ami esetlegesen megakadályozta az indíthatóságot leállítás után. Ez nyilvánvalóan kiemelkedően fontos a járművek meghajtásaként használt reaktoroknál.
A 20%-os dúsítású urántöltettel az OK-700 esetében 90 MW (gyakran még: 89,2 MW) hőteljesítményt adott le egyetlen VM-4-2. A rendszer névlegesen kinyerhető (hasznos) teljesítményeként 52.000 lóerőt (38,78 MW) adnak meg, mely azonban nagyobb, mint következőkben szereplő értékek együttese a két fő- és a két mellékturbinára. A felmelegített primer köri víz hőjét – reaktoronként – öt álló gőzfejlesztőn át kapta meg a szekunder kör. A keletkező gőzzel két GTZA-635 (néha tévesen: TZA-635) turbinát hajtottak meg, azok pedig egy-egy hajócsavart. Utóbbiak egymás mellett voltak, míg a reaktorok és a turbinák egymás mögött. A keresztkapcsolásoknak köszönhetően bármelyik reaktor bármelyik turbinát el tudta látni gőzzel, akár egyszerre egy reaktor a két turbinát is, csak akkor szó szerint félgőzzel. A turbinák tengelyenként mért teljesítményét 20.000 lóerőben (14,71 MW) adják meg, továbbá két, áramfejlesztést szolgáló, OK-2A gőzhajtású generátor veszi még az energiát a reaktoroktól, egyenként 3 MW teljesítménnyel (4.023 lóerő). Ezzel a reaktorok hőteljesítményének hasznosított része 19,7% körül van (2x90 MW vs. 2x14,71+2x3 azaz összesen 35,42 MW vagy 47.500 lóerő). A fő csavarokat kis sebességű (néhány csomó) haladáshoz – így például csendes üzemben – két, egyenként 225 kW (306 lóerő) teljesítményű PG-153 villanymotor is hajthatja. Tartalékként két, egyenként 460 kW-os (617 lóerős), fantáziadús nevű DG-460 dízelgenerátor szolgál, melyekhez kitolható légcső (snorkel) is tartozik, hogy periszkópmélységben is lehessen őket használni. A villamos hálózat 380 V váltóáramú, kiegészítésként kétszer 112 db 48-SzM típusú ólomsavas akkumulátorral.

Egy, a későbbi, utolsó SSBN változatot, a Projekt 667BDRM-et mutató videórészletből két kivágás a reaktorok egyikének tetejéről, előbb oldal, majd felülnézetben

Noha a két reaktoros kialakítás volt az általános a második generációs szovjet tengeralattjárók esetében, a kétcsavaros kialakítás már nem, a Projekt 670 és 671-esek is eggyel készültek. Ezt Kovaljov a nagyobb megbízhatósággal magyarázta, a keresztkapcsolásokra tekintettel. A kétcsavaros kialakítás azonban legalább ennyire volt az első generációs osztályok öröksége, továbbá a 670 és 671-esekhez képesti nagyobb méretek következménye is. Kovaljov visszaemlékezése szerint ezért a döntésért bírálta a – hajóépítési vagy a honvédelmi – minisztérium, de ő helyettesére, Szpasszkijra hallgatott, aki ezt az elrendezést javasolta. Azt azonban maga is elismerte, hogy ez a megoldás, pláne amiatt, hogy a két turbina nem egy gépterembe került, hanem kettőbe, egymás mögé, jelentősen megnövelte a méreteket és a vízkiszorítást is. Kovaljov szerint ráadásul így további, zajcsökkentő megoldásokat alkalmazhattak. Itt valószínűleg arra gondol, hogy a nagyobb géptérben több lehetőség volt ilyesmire, de mint alább olvasható, valójában nagyon hangosak lettek a 667-esek. A gyakorlatban az őrjáratok során az egyik reaktort le lehetett állítani, a kis sebességhez nem kellett nagy teljesítmény. Ez egyébként szintén csökkentette a zajt, mivel nem kellett akkora teljesítmény az adott reaktor főkerkingtető szivattyúinak. A két turbina viszont egyszerre dolgozott, ami dupla zajforrás még a kisebb fordulatszámuk esetén is. A fő propellerek öttollúak voltak, az osztály hosszú pályafutása miatt néhány, különböző változatban.
A két reaktor beépítése mögött talán még mélyebben meghúzódó okok voltak, mint a két hajócsavarra vonatkozóak. Egyrészt a szovjeteknél megszokottabb, kettős burkolat, és a nagy tartalék úszóképesség elvárása eleve nagyobb törzsű tengeralattjárókat eredményezett, amik nehezebbek voltak és nagyobb ellenállást fejtettek ki, azaz több erő kellett a felgyorsításukhoz. Jellemző, hogy a korabeli amerikai SSBN-ek 1-2000 tonnával könnyebbek voltak, és csak 20 csomót meghaladó sebességet vártak el tőlük, míg a 10.000 tonnás Projekt 667A-tól majdnem 30 csomó körülit, márpedig a sebesség növelésével négyzetesen nő a szükséges hajtóerő, azaz energia. Továbbá, amíg a rivális amerikai tengeralattjárók például Spanyolországban vagy az Egyesült Királyságban külföldi bázisokat is használhattak, addig a szovjeteknek ilyesmire nem volt lehetősége – a Projekt 667 tervezése idején biztosan nem, de később is csak kivételes esetekben állomásoztattak SSBN-eket akár műszaki, akár bizalmi okokból a néhány, rendelkezésükre álló, baráti kikötőben. Ezért aztán számukra nagyon fontos volt a megbízhatóság, a redundancia. Mindezek miatt két reaktort építettek be a legtöbb osztályukba. Egyébként a korabeli turbinák – az adott méretkorlátozásokat figyelembe véve – is inkább a relatíve kisebb teljesítmények leadására voltak alkalmasak. Még az amerikai, egy reaktoros SSBN-ek is két turbinán át adták le az erőt az egyetlen hajócsavarjukra, így jól érthető, hogy a szovjetek a két reaktor erejét is gyakran – de nem mindig – megosztották két csavarra.

Az eredeti csavarok még meglehetősen hasonlítottak a második világháborús dizájnra, de átmérőjük már jóval nagyobb, ami kisebb fordulatszámot tesz lehetővé

Az eredeti nevén NII-8-at, a NIKIET-et, azaz az Energetikai Technológiai Tudományos Kutató és Tervező Intézetet (Научно-исследовательский и конструкторский институт энерготехники) 1952-ben pontosan a tengeralattjáró-fedélzeti reaktorok megalkotására hozták létre. A Nyikolaj Antonovics Dollezsal vezette, utóbb róla is elnevezett intézet ezt teljesítette is a VM-A révén, amivel az első szovjet atomtengeralattjárót, a Projekt 627 (November) osztályú K-3-ast látták el. A NIKIET tervezte az RBMK reaktortípust is

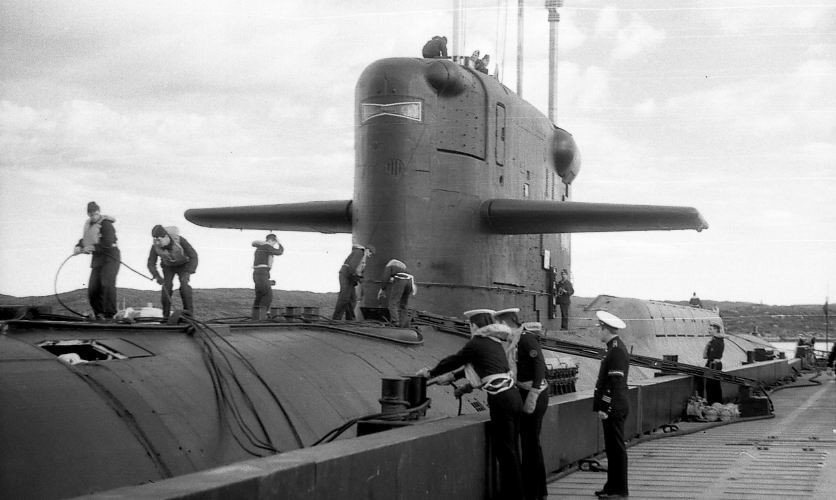
A 667A méreteit jól szemléleti ez a felvétel, melyen talán a K-210 látható (nem az eredeti toronykialakítással)
Bár a szovjetek is értették a zajcsökkentés fontosságát, az sokáig nem szerepelt elsődleges szemponként a terveikben. Inkább a sebesség növelésére helyezték a hangsúlyt. A rivális amerikai osztályoknál a kezdeti, kiábrándítóan nagy zajszint után (Nautilus SSN, vagy pont a George Washington SSBN) ott – együtt a nukleáris meghajtás biztonságával – a csendes üzem lett a prioritás. Épp amerikai forrásból származó az az értékelés, hogy a Projekt 667-esek kezdetben olyan hangosak voltak, mint a világháborús tengeralattjárók – tehát nagyon hangosak. Az alkalmazott zajcsökkentő megoldások nem voltak elégségesek. Ezek között a hajócsavarok kialakítása, a fő- és segédgépek rezgéscsökkentő gumibevonata, a belső, nyomásálló test hangszigetelő gumiborítása és a külső burkolat keménygumi borítása volt megtalálható. Eleve a klasszikus szovjet konfiguráció, a kettős test és a két hajócsavar nem kedvezett a zajcsökkentésnek. A külső réteg rezonátorként működve felerősítette a belső felől érkező rezgéseket, és a két csavar maga, együtt a két tengellyel és két turbinával – illetve például a Projekt 667A esetében a két reaktor dupla mennyiségű szivattyújával – extra zajforrás volt. A szovjet ipar általánosságban pontatlanabbul, nagyobb tűréssel dolgozott, ami miatt minden berendezés, eszköz, ami mozgó alkatrésszel rendelkezett, vagy ilyennel érintkezett, sokkal jobban generálta és/vagy átvette a rezgést, összességében sokkal több zajt keltve így. Az alkatrészek, berendezések által keltett vibráció csökkentésére szolgáló szabványokat csak a ’60-as években vezették be a kapcsolódó iparágakban. Ilyen volt például a VAH-68, aminek a neve is az 1968-as évet jelöli. Ez azt jelentette, hogy mire egyáltalán ezek megjelentek, a 667A-k számos részegysége már el is készült, és amúgy sem minden, érintett vállalat állt készen azonnal az ilyen jellegű intézkedések bevezetésére, ez sok helyen sok időbe telt. Eközben viszont a vezetés nagyon is erőltette, hogy minél gyorsabban minél több új SSBN-t készítsenek ezek az üzemek, tehát nem volt idő új technológiák bevezetésére.
A tényleges zajszint még évtizedekkel később sem nyilvános, az atomtengeralattjárók esetében csak jó becslések léteznek. Ráadásul a Projekt 667 legutóbbi verziói még napjainkban is szolgálatban állnak, és akármennyire is különböznek a kezdeti 667A-któl, az alap mégiscsak ugyanaz. Ami a konkrét becsléseket illeti, a felhasznált források „mintegy 160” és 135-140 dB-t adnak meg (4 csomónál), utóbbi esetében ráadásul hozzátéve, hogy ugyanez a szerzőcsapat korábban magasabb számokat közölt. A későbbi 667 változatok értékei a vonatkozó fejezetekben fognak szerepelni. Orosz források – szokásos módon – általában igen elismerően nyilatkoznak az osztály zajszintjéről. Az utolsóként elkészült 667A, a K-258 tesztjeiről a parancsnok azt írja, hogy annyira halk volt, hogy a bemérést meg kellett ismételni, hibásnak vélték az első adatokat. Ez elképzelhető az osztályon belüli, a gyártás során elért fejlődés eredményének megnyilvánulásaként, de az már nem igazán, hogy a K-258 olyan halk lett volna, mint a kortárs amerikai típusok. A háttéripari korlátok mellett maguk a szovjet-orosz leírások is világosak a tekintetben, hogy ekkor még nem volt náluk elsődleges a zajcsökkentés, noha természetesen foglalkoztak vele.
Hogy legyen mihez viszonyítani – a decibel skála logaritmikussága mellett –, a manapság korszerűnek számító tengeralattjárók zajszintjét már akár 100 dB alattinak adják meg, míg a háttérzaj az óceánokban elérheti a 95 dB-t is. Az sem mellékes, hogy az amerikai és a szovjet/orosz haditengerészet máshogyan méri a hangszintet, ezért hiába van mindkettő decibelben megadva, nem biztos, hogy két, egyező érték azonos valós hangszintet jelent.
(forrás) alapján
A tengeralattjárók hangjának elsődleges forrásai különböző sebességeken. Az ábra valójában kétszeresen logaritmikus, mert elsőre szokatlan módon a sebesség is így van feltüntetve, míg a decibel skála önmagában is az

Szárazdokkban áll egy Projekt 667AU SSBN és egy Projekt 671 (nyugaton: Victor) SSN, melyek azonos generációba tartozó tengeralattjáróosztályok. A kép a felirat alapján 1989-ben készült
A korábbi osztályoknál a Projekt 667A-k sokkal kényelmesebbeké váltak. A személyzet elhelyezése a korábbiaknál kisebb kabinokban történt, ami több – persze így se sok – magánszférát biztosított. A tengeralattjáró minden rekesze önállóan légkondicionált volt, és nem csak a kintről mérhető hangszintre figyeltek, hanem a személyzet kényelme érdekében a rendszeres tartózkodási helyein is igyekeztek zajt csökkenteni. A kabinokban burkolatot szereltek fel, már nem borítás nélkül futottak ott a különböző kábelek, csővezetékek. A helyiségek közé tiszti társalgó, és a tiszti után immár tiszthelyettesi étkező is került. Utóbbit rendezhették át edzéshez vagy filmvetítés céljára. Ettől ha a névlegesen tengeren tölthető, 70 napos időszak nem is lett kellemes, de sokkal kényelmesebb, mint az előző generációs egységeken, amik még bőven örököltek a második világháborús elődöktől ergonómia terén is. Ahol 119 főben adják meg a személyzet létszámát, ott ezt 32 tisztre, 38 tiszthelyettesre és 49 tengerészre bontják.
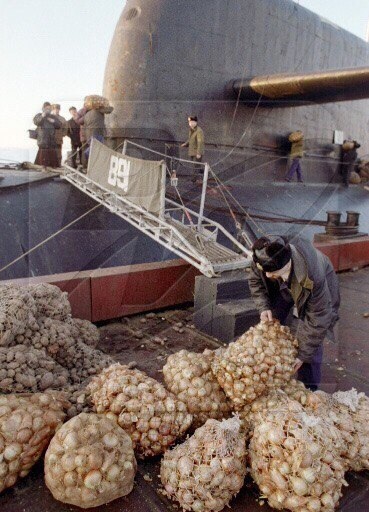
Élelmiszer berakodása a K-395-ösre

A korábbi videóból – azaz ismét egy későbbi változatról – egy újabb pillanatkép: a konyha
Navigáció és berendezések a Projekt 667A-kon
A korai 667A-k egyik legnagyobb hiányosságának a navigációs rendszerük tekinthető. Nem magának a tengeralattjárónak az eltévedése merült fel, hanem a helyzetének a víz alatti, nagy pontosságú meghatározása volt a gond. A 667-esek értelmét a fedélzetükön lévő SLBM-ek adták, amik viszont a működési elvük miatt igényelték volna a minél jobban ismert indítási helyzetet. Négy, korai 667A-ra (K-26, K-32, K-216 és K-207) a Сигма (Szigma, máshol: Szigma-667) rendszert telepítették, melyet „minden szélességi fokon használhatóként” említenek. Ez ebben az esetben azt jelentette, hogy az északi sark közelében is működött, mivel a navigáció az egyre nagyobb szélességi körökön egyre nagyobb problémát jelentett a hagyományos módszerekkel.
Később még kiderül, hogy a „minden” az korántsem tényleg ezt jelentette, hanem nagyjából a 85. szélességet. Továbbá más források szerint a Szigma is a Projekt 667 számára készült, de ez biztosan nincs így, a Projekt 629 és 658 egyes változatai is alkalmazták, és a próbáit illetően egy Projekt 627A-t, a K-181-est is megadják. A Szigma gyártója az NPO Azimut, a későbbi Elektropribor. Többek közt mágneses tértől független működési elvű giroszkópikus iránytűkkel (gyrocompass), csillagnavigációs mérésekkel és a tengeralattjáró vízhez képesti sebességét mérő eszközön alapulva működött. Ezek egyúttal azt jelentették, hogy viszonylag gyakran minimum periszkópmélységben, vagy a felszínen végzett mérésekkel kellett időnként pontosítani a hajók helyzetét. Ezek során egyenesen, pontosan állandó mélységben – vagy a felszínen – és sebességgel kellett haladni. Ez a gyakori pontosítás műveleti szempontból problémás volt, bár fontos hozzátenni, hogy a műholdas jelek vételét lehetővé tévő, kis mélységben kibocsátható antennákig nem szűnt meg ez az eljárás.
A még a Szigma-667 navigációs rendszerrel ellátott Projekt 667A-kat elvileg onnan lehetne azonosítani, hogy a Самум (Számum, Homokvihar) nevű rádiószextáns volt a torony elejénél – felülről nézve – a bal felső részbe építve. Az alatta lévő, négyszögletes burkolat is ehhez tartozott. Ugyanakkor az újabb navigációs rendszerrel ellátott 667-eseken is sok esetben megtalálható legalábbis a borítása. A képen a K-137
Bunn and Tsipis: Ballistic Missile Guidance… 11. o.
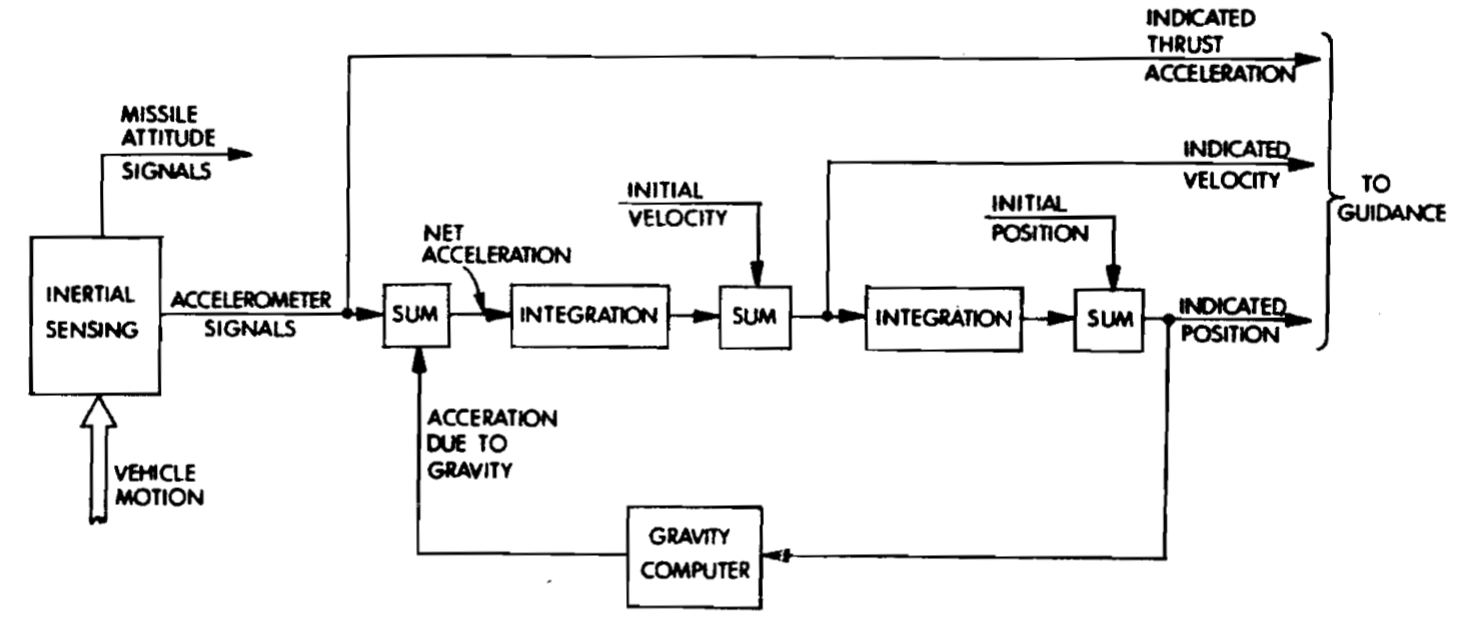
Annak okát, hogy miért volt szükség a rakétaindítási pozíció pontos ismeretére, a fenti sematikus ábra mutatja meg, lásd az INITIAL POSITION és INITIAL VELOCITY bemenő adatokat
A ballisztikus rakéták azt tudják, hogy egy adott kiindulási helyzetből milyen röppályát kell tartani ahhoz, hogy egy előzetesen ismert pozíciójú pontba csapódjon a végén a visszatérő egységük. Ha tehát a betáplált indítási helytől távolabb történik a start, a rakéta akkor is az előre betöltött paraméterek tartását fogja végezni. Ez csak később, a radarvezérlésű, manőverező fejrészekkel vált lehetségessé, de azok jellemzően nem stratégiai feladatkörű eszközökre kerültek. A ballisztikus rakétáknál a jelző azt is megmutatja, hogy útjuk nagy részét szabadon, ballisztikus pályán teszik meg. Minél korábbi a rakéta, annál inkább igaz, hogy az akár 40 perces repülése során csak az első pár percig, a hajtóművek kiégéséig tudja korrigálni a pályáját. Az évtizedek során végzett fejlesztések a rakéták repülésének későbbi fázisaiban is lehetővé tették a pozíció korrigálását, ezzel együtt a kiindulási adatok pontos ismerete végig elsőrendű maradt ezeknél a fegyvereknél.
A hosszabb ideig lemerülve is pontos navigáció kérdésében a valódi megoldást egy inerciális rendszer (INS) jelentette. A szintén három dimenzióban nagy távolságokat megtevő – csak nagyobb sebességű – bombázókhoz szükséges, már többé-kevésbé használható INS-t legalább a ’40-es évekig is vissza lehetett vezetni. A Szovjetunióban is ugyanezt a hatalmas munkát kellett elvégezni. 1966. február 23-án elsősorban a Projekt 667-esekhez szánt navigációs rendszer megalkotása érdekében hozták létre az NII-346 intézetet Moszkvában. A kezdés azonban késeinek bizonyult, mert mire 1971-re elkészültek a Tobol (egy orosz folyó) nevű navigációs rendszer első példányai, az első Projekt 667A-k már szolgálatba is álltak. (Ezzel együtt különösen érdekes, hogy elvileg az első kettőt követő négy 667A kapta még a Szigmát, az első kettő már eleve a Tobolt.) Oleg Vasziljevics Kiscsenkov vezette az intézetet és a Tobol programot is, és az eredményeket látva a hajóépítési minisztérium később az NII-346-ot tette meg a központi szovjet irodává, mely inerciális navigációs rendszereket készít hajók és tengeralattjárók számára, bár az Elektropribor végig konkurensük maradt. A Tobolt (Tobol-667A) 1972-től kezdték telepíteni a 667A-kon, először a K-156-oson. 1973-ban nyilvánították szolgálatban álló rendszernek, és utólag az összes 667A megkapta. Az NII-346 és Kiscsenkov munkája aztán végigkísérte a Projekt 667 történetét, lásd később. A Tobol a Tavda majd a sorozatgyártott Irtisz INS mellett a tengeralattjáró tengerfenékhez képesti sebességet megállapító MG-43 Horizont hidroakusztikus sebességmérőből és az ezekből származó információkat feldolgozó digitális számítógépből állt össze – sok más alegység mellett. A sarkvidéki navigáció nehézségeit mutatja, hogy névlegesen a 85. szélességi körig tudott a rakétaindításhoz adatokat biztosítani a Tobol, azaz az utolsó 5 szélességi körben már nem.
Máshol a Tobol első próbáját a K-245-öshöz kötik, de az 1972 április 29-én csak a rakétaindításhoz használta először a rendszert, júniusban az Egyenlítő környéki, októberben pedig a sarkvidéki tesztjét végezte el.
A felhasznált források szerint a Tobol a digitális számítógépével is az elsők között kellett, hogy legyen a Szovjetunióban, és az első volt az ottani INS-ek terén is. Gyakran elég nehéz megmondani, hogy egy-egy technikai, technológiai újítás valójában mikor és milyen eszközön is jelent meg először. Az INS esetében rögtön adódna is, hogy azt először repülőgépekhez hozzák létre, mint ahogyan ez az USA esetében történt, lásd a blogos XB-70 ismertető vonatkozó, 11. részét. A hajókhoz és főleg tengeralattjárókhoz való kialakítás, az SINS (Ship’s/Submarine’s INS) aztán ezekre is építve, sürgőssége miatt nagyon gyorsan el is készült 1958-ra, és a USS Nautilus kapta meg először egy korai változatát, mely ténylegesen az SM-64 Navaho ICCM-ekből származott. A feladat nehézségét jól mutatja, hogy a Szovjetunióban csak 1966-ban jutottak el oda, hogy megalapítsák a rendszer ottani megfelelőjének létrehozásán dolgozó, külön intézetet. A Tobol csak egy évtizeddel az amerikai SINS után állt készen a használatra, ami már a hidegháború ezen fázisában jelezte a szovjet ipar lemaradását. Persze a Tobol sem volt előzmény nélküli: a tengerészet számára elméleti munkákat 1957-től említenek, majd 1960-ban egy rakétavezérlő rendszerből kiindulva próbálkoztak meg a dologgal, de ennek 1961-es tengeri próbái elégtelen pontosságot eredményeztek. Ezektől a munkáktól függetlenül a jelentős tengerészeti eszközbeszállító, az Elektropribor is dolgozott az INS-en, csak más technikai elemekkel, és a ’70-es években gyártottak is a Szintézis nevű rendszerüket, de az egyértelműen rosszabbul teljesített az SSBN-ekre vonatkozó követelményeket illetően, mint a Tobol.
![]()
Az NII-346 1988-ban nevet is kapott, amivel a szovjet haditengerészet a kulcsfontosságú, tengeralattjárófedélzeti navigációs rendszerek fejlesztésében és gyártásában játszott szerepét honorálta. Ekkortól Delfin Központi Kutatóintézetként ismert, és erre utal a logója is. 2021-ben a fentiek szerint részben riválisnak is tekinthető Elektropriboré lett az intézet. Lent O. V. Kiscsenkov
A fenti, navigációra vonatkozó bekezdés csak pár soros leírása annak, hogy a világ két vezető hatalma a maga évtizedes munkájával megalkotta az addig rendelkezésre nem álló, bár persze már ismert elvű inerciális technológiát. Ezek magukban is hallatlan erőfeszítést jelentettek, de a rakétahordozó tengeralattjárókhoz nem ez volt az egyetlen, ekkora horderejű feladat. Bár már készen volt, egy fedélzeti atomreaktornál komplexebb berendezést magában is nehéz elképzelni – még napjainkban is. A merülésben lévő tengeralattjáróban tárolni, majd onnan indítani a még mindig újdonságot jelentő, bonyolult ballisztikus rakétákat szintén óriási munka volt megtervezni és megvalósítani. Ezek szintén inerciális vezérlést használtak, és szükségük volt az atomrobbanófejek méretének és súlyának csökkentésére. Erről még az ’50-es évek legvégén is azt gondolták mindkét felén a világnak, hogy legalább tíz évbe fog telleni (lásd szintén az XB-70 kapcsán ITT). Ezeknek az összetett eszközöknek az irányítására, vezérlésére újfajta számítógépek kellettek, amik szintén sehol sem voltak még. A rakéták szilárd hajtóanyagának rendelkezésére állásáig az USA nem is alkalmazott SLBM-eket, de erről – megint csak iparuk korlátai miatt – a szovjetek lemondtak eleinte. Az előbb felsorolt, szinte beláthatatlan munkát igénylő technológiákat és gyártásukat megfejelte, hogy az is rögtön világossá vált, hogy az inerciális rendszerek nem lesznek elég jók hosszú távon, úgyhogy műholdas navigációs – és mellesleg kommunikációs – rendszerre is szükség lesz az egyre nagyobb hatótávú SLBM-ek megfelelő pontosságú indítási adataihoz. Mindezt akkor, amikor még egy kézen meg lehetett számolni a Föld körül keringő műholdakat.
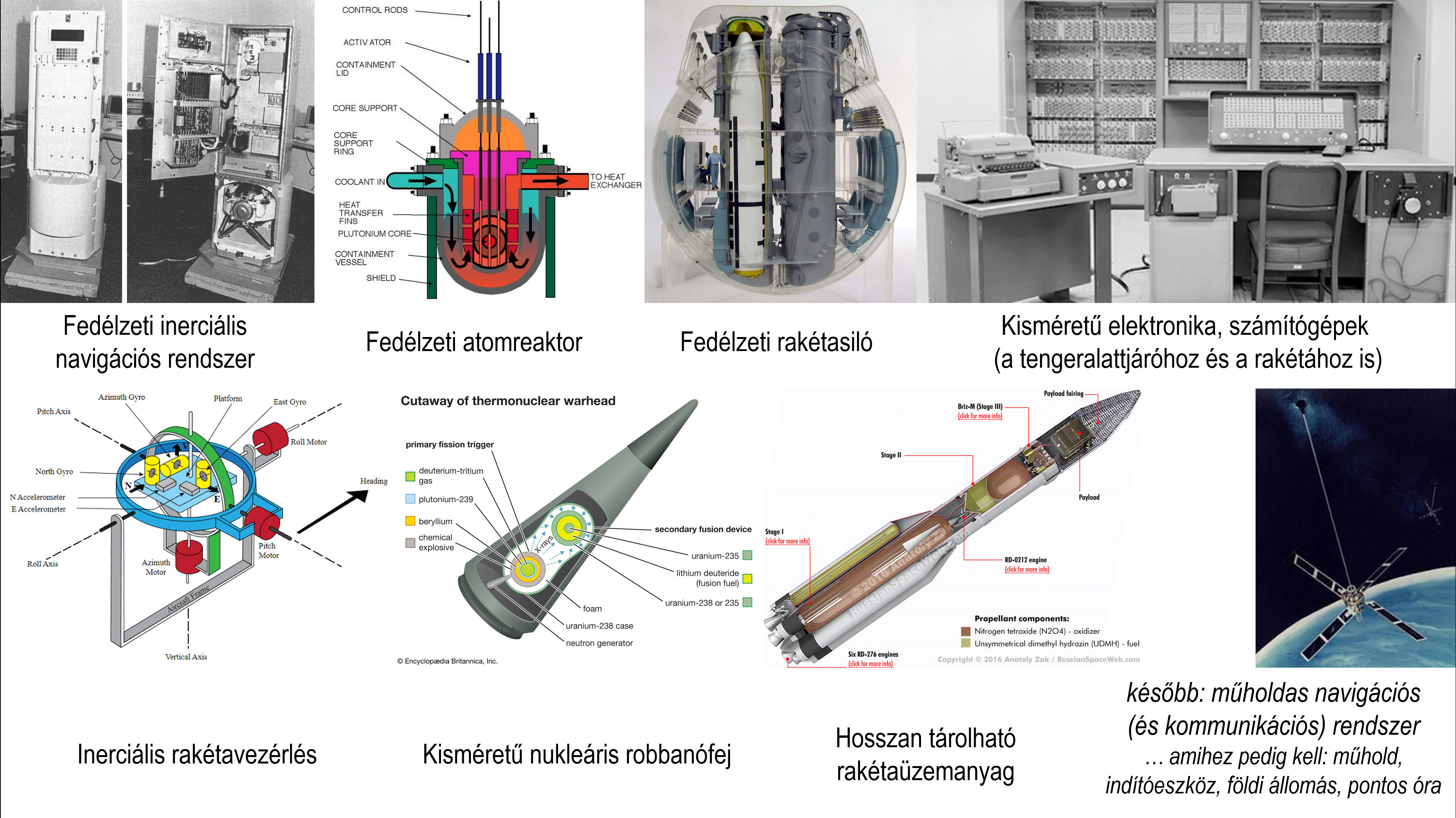
Egy jól használható SSBN-hez csak ennyi, az ’50-es, és a szovjetek esetében néha a ’60-as években még nem létező technológia kellett. Amivel eleve rendelkeztek, az az atomreaktor és az elég pontos órák, illetve már elfogadhatóan álltak a rakétasilók, a rakétavezérlés, a robbanófejek mérete és az üzemanyagtárolás kapcsán is
A Projekt 667A-kat számítógépes rendszer felügyelte, hogy azok automatikusan tarthassák a beállított irányt és mélységet. A sorozatban indított rakétáknak is szüksége volt arra, hogy a tengeralattjáró stabil platform legyen, ne változtassa a mélységet a művelet közben. A műholdas navigációs rendszerrel 1956-tól kezdtek foglalkozni, és végül a Циклон azaz Ciklon nevet kapta. A Ciklon, majd Залив (Zaliv) azaz Öböl műholdak képesek voltak szöveges üzeneteket is továbbítani, amihez meg kellett oldani, hogy az adóktól származó üzeneteket tárolják addig, amíg a vevő vételi helyzetbe nem kerül, hiszen az atomtengeralattjárók csak időnként emelkedtek periszkópmélységbe e célból. Ez általában 2-3 órás csúszást okozott, de ha mindkét fél aktívan kommunikálni tudott a műholdakkal, akkor természetesen azonnali üzenetváltás is lehetséges volt. A Ciklon fejlesztése azonban – tekintettel a feladat nagyságára is – elhúzódó volt, szoftveres gondok adódtak. A Föld geoid alakjának nem megfelelő figyelembe vétele és az ebből adódó gravitációs eltérések miatt a szoftver által számított pozíció pontatlannak bizonyult, így a rendszer akár kilométeres nagyságú hibával tudott csak helyadatokat szolgáltatni: az első teszteken például 3 km-est. Ezért bár 1972-ben rendszerben állónak nyilvánították, valójában már folyt a közvetlen továbbfejlesztését jelentő, Ciklon-B rendszer készítése, mely egészen hasonló volt, de már száz méter körüli hibával dolgozott. A Ciklon-B a Парус (Parusz, Vitorla) műholdakat alkalmazta, ezért gyakran a teljes rendszert Vitorla néven említik.
A ’80-as évek végétől a Projekt 667 család későbbi tagjaihoz hasonlóan az A-kat és AU-kat is ellátták a Szintézis antennával, ami a Ciklon-B utódjával, a Sljusszal való kapcsolattartásra szolgál, lásd később.
A Ciklon-B rendszerhez tartozó műhold grafikája
A Projekt 667A-k beépített demagnetizáló berendezéssel is rendelkeztek, hogy legalábbis szinten tartsák a tengeralattjárók mágneses terét, megnehezítve a felderítésüket. Az eltérő elektródpotenciállal rendelkező fémekből álló test és hajócsavarok keltette elektromos teret is egy aktív eszközzel csökkentették. (E két berendezésről nem írtak többet a források, de előbbi meglétét egy amerikai videó is említi.) A víz alatti tájékozódást, a torpedók számára a célok felderítését, akár a kommunikációt az MGK-100 Kercs szonárkomplexum biztosította. A fő szonár névleges hatótávolságára 1-20 km-t adnak meg, ami ismét csak arra utal, hogy számtalan tényezőtől függ egy ilyen érték. Víz alatti telefonnal is ellátták a tengeralattjárót. Az SSBN-eket még a többi atomtengeralattjárófajtánál is kiterjedtebb kommunikációs eszköztárral szerelték fel, mert stratégiai feladatkörük akár első, akár második csapásnál kiemelkedően fontossá tette, hogy megbízhatóan el tudják őket érni, illetve azok jelenteni tudjanak. Így közép-, rövid- és ultrarövidhullámú rádiók is voltak a fedélzetén. 1970-től a tengerészet egységes, Molnyija (Villám) kommunikációs komplexumával látták el az egységeket, 1974-től pedig már a továbbfejlesztett Molnyija-L-lel. Ennek része a rövid- és hosszúhullámon is több csatornán működő Bazalt automatikus vevő, a frekvenciáját automatikusan váltogató Szkumbrija (Makréla) adóvevő, továbbá a Paraván VLF tartományú kapcsolatot biztosító, cél- illetve műholdas navigációs adatokat venni képes, felengedhető bója. Az automatikus titkosított adást és a kódolt adások feloldását elvégző Integrál rendszer egészítette ki a komplexumot. A felszíni keresésre az RLK-101 Albatrosz (nyugaton: Snoop Tray) radar szolgált, radarbesugárzás-jelzőként a VAN-Sz (Stop Light), az ellenséges rádióforrások felderítésére, megfigyelésére (ESM) pedig az MRP-10(M) Zaliv-P (Brick Pulp?). Először jelent meg a Króm-K majd -KM transzponder (barát-ellenség azonosító, IFF) a flottában.
A Projekt 667A tornyán található antennák, eszközök. 1: MRP-10(M) Zaliv-P ESM antenna; 2: légcső (snorkel); 3: VAN-Sz radarbesugárzás-jelző, mögötte az RLK-101 Albatrosz radar; 4: Zavjesza rádió-iránymérő antenna; 5: PR-40 Volna csillagnavigációs periszkóp; 6: PR-14 periszkóp; 7: PZNG-8M periszkóp; 8: Iva-M (Fűz) kommunikációs antenna; 9: MT-70-8 periszkóp; 10: PZNSz-8 periszkóp; 11: a giroszkópikus iránytű ismétlőkijelzője, iránymérő, szextáns. A toronyban lévő híd nyitott
A Projekt 667AU változat részletes belső elrendezése. Az A-tól az AU nem sokban különbözött, szinte csak a rakétafegyverzetben és a kapcsolódó elektronikában, lásd később részletesen. A bejelölt részek: 1: a Kercs szonár adó-vevő egységei; 2: tartályok a buborékmentes torpedóindításhoz; 3: 533 mm-es torpedóvetőcsövek; 4: hengeres (?) ballaszttartály; 5: a kilőtt torpedók súlyát kompenzáló ballaszttartály; 6: elülső búvónyílás (a személyzetnek); 7: elülső vészhelyzeti jelzőbója; 8: tartalék 533 mm-es torpedók; 9: torpedóbetöltő nyílás; 10: torpedóterem; 11: elülső akkumulátorok; 12: hidroakusztikus sebességmérő; 13: fő ballaszttartályok; 14: csörlő és csörlőhajtómű; 15: nagynyomású levegőtartály(ok); 16: személyzet szállásai; 17: hátsó akkumulátorok; 18: a giroszkópikus iránytű ismétlőkijelzője, iránymérő, szextáns (a toronyban); 19: MT-70-8 periszkóp(rendszer); 20: PZNG-8 periszkóp; 21: (parancsnoki) torony; 22: központi (3.) rekesz; 23: irányítóterem*; 24: PR-40 Volna csillagnavigációs periszkóp; 25: Szajga (Tatárantilop) rádiószextáns; 26: Zavjesza (Fátyol) rádió-iránymérő antenna; 27: Albatrosz radar; 28: légcső (snorkel); 29: Zaliv-P (Öböl) ESM antenna; 30: elülső rakétatároló (4.) rekesz; 31: rakétasiló; 32: hátulsó rakétatároló (5.) rekesz; 33: segédgépek (6.) rekesze; 34: dízelolaj-tartályok; 35: reaktorok (7.) rekesze; 36: reaktor; 37: gőzfejlesztő; 38: hőcserélő (nem megadott célú); 39: nyomásszabályozáshoz szükséges tartályok (gáz vagy gőz); 40: elülső turbinaterem (8. rekesz); 41: gőzturbina; 42: kondenzátor; 43: rugalmas tengelykapcsoló; 44: bolygóműves fordulatszámcsökkentő; 45: fő nyomócsapágy; 46: olajhűtő; 47: hátulsó turbinaterem (9. rekesz); 48: kondenzátor villamos szivattyúja; 49: turbógenerátor; 50: menekülőkamra; 51: hátulsó búvónyílás (a személyzetnek); 52: villanymotorok a kis sebességű, csendes meghajtáshoz; 53: rugalmas tengelykapcsoló; 54: 10. rekesz; 55: hátulsó vészjelző bója; 56: kormányszerkezet. *: valójában a 22-es jelzés az irányítóterem
Amint az 50-es tétel mutatja, a Projekt 667A-k – és későbbi verzióik – el voltak látva egy menekülőkamrával (orosz terminológia szerint всплывающих спасательных устройств (ВСУ, VSzU), szó szerint kb. kb. felúszó mentőberendezés). Ez azonban nem teljesen volt azonos az először a Projekt 705-ösön – és Projekt 661-esen – megjelenő mentőkabinnal (всплывающих спасательных камер (ВСК, VSzK), szó szerint kb. felúszó mentőkamra). Ezeken az osztályokon a személyzet akár egésze, de legalábbis jelentős hányada egyszerre befért a kabinba. A nyugati, az elérhető rajzokon alapuló becslések szerint viszont a korábbi osztályokon és a Projekt 667-eseken csak 1-4 ember, utóbbi esetében konkrétan 2 fő fért be. Ugyanakkor a részletes leírások szövege meg sem említi a VSzU-t a 667-esek esetében.
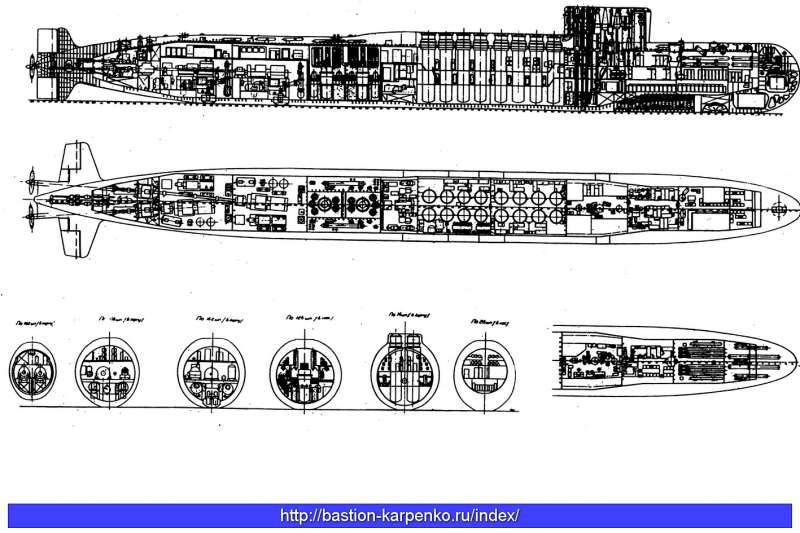
Az oldalsó metszet ugyanaz, mint a fentebbi képen, míg a felülnézeti a középső, illetve jobbra lent a felső fedélzetet mutatja. Az például kiderül ezekből, hogy a csavartengelyek nem egyenesen hátrafelé irányulnak, és hogy a bal tengely hosszabb, turbinája az elülső gépteremben van
A Projekt 667A belső felépítését is feltáró, 1/48 léptékű makettet bemutató poszt ITT olvasható.
A források az utolsó részben lesznek felsorolva. Folytatás a 4. résszel ITT.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}